Robotics
R1 RPM Measurement (2)
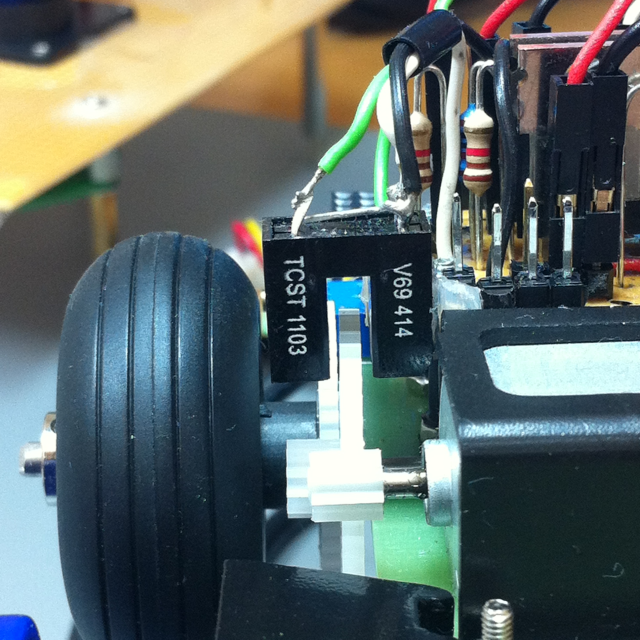
Transmissive light method using TCST1103
Measuring the RPMs with the Reflective light method using TR9904, while working, turned out not to be a very practical solution.
We have to improve on:
- the number of signals per rotation
- the signal strength
The first point I addressed by moving the sensor one gear up.
Since the gear ratio between the middle gear and the last gear is 10/50, the middle gear should provide 5 times the count per rotation.
To improve on the second point I switched from the reflective ELI TR9904 to the transmissive TCST1103 light sensor.
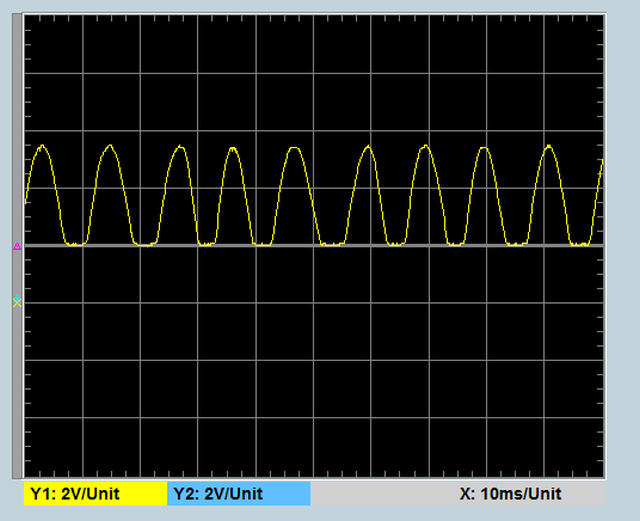
This greatly improved the signal quality:
- Not only now we have 5 times the counts per rotation.
- When with the reflective method we only had a signal of 500mV, now the signal is about 4.5V strong.
The signal quality can be improved even further by using a comparator circuit.
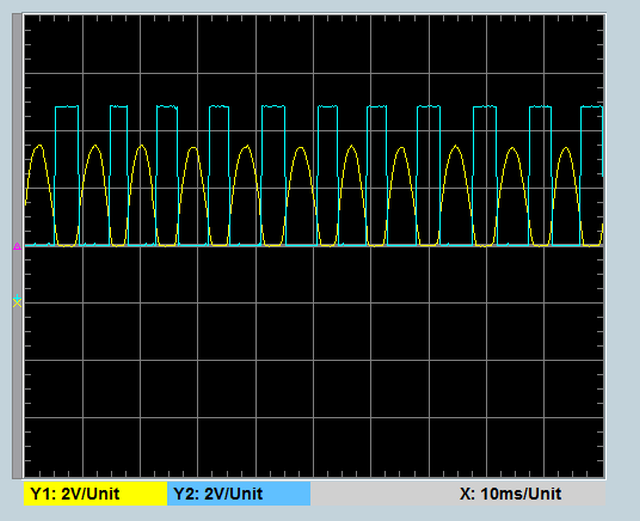
This gives a nice digital signal of 5V, that is good enough to be fed to a MCU's digital input pin. That the signal is inverted doesn't matter, since that will not change the counts per minute.
Lets see the new sensor in action: